
حل محدودیتهای بیش از حد در یک مدل مکانیزم چندجسمی
Resolving overconstraints in a multi-body mechanism model
این مثال نشان میدهد که چگونه میتوانید محدودیتهای بیش از حد را در یک مکانیسم چندبدنه حل کنید.
در این صفحه بحث میشود:
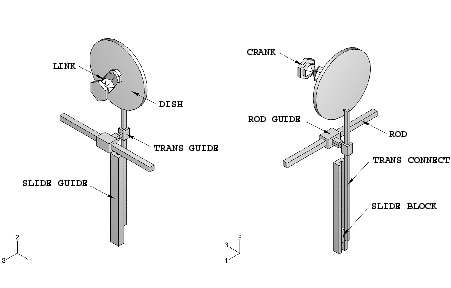
هندسه و مدل
بارگذاری و شرایط مرزی
درک پیامهای محدودیت بیش از حد
اصلاح مدل بیش از حد مقید
نتایج و بحث
فایلهای ورودی
ارقام
محدودیت بیش از حد زمانی رخ میدهد که چندین محدودیت سینماتیکی سازگار یا ناسازگار به یک درجه آزادی اعمال شوند. محدودیتهای بیش از حد ممکن است منجر به راهحلهای نادرست یا جلوگیری از همگرایی شوند. تعداد زیادی از موقعیتهای محدودیت بیش از حد شناسایی شده و در نهایت به طور خودکار یا در پیشپردازنده یا در طول تحلیل Abaqus/Standard حل میشوند ( به بررسیهای محدودیت بیش از حد مراجعه کنید ). اکثریت قریب به اتفاق محدودیتهای بیش از حد که توسط پیشپردازنده حل نمیشوند، توسط حلکننده معادله شناسایی میشوند. علائم زیر چنین مدلهای محدودیت بیش از حد را در Abaqus/Standard مشخص میکنند :
پیامهای هشدار دهندهی محور صفر که در فایل پیام ( .msg ) صادر میشوند و نشان میدهند که سیستم معادلات دارای رتبهی ناقص است.
نیروهای واکنشی به طور غیرمنطقی بزرگ.
نیروهای میانگین زمانی بسیار بزرگ در فایل پیام.
یک راهحل جابجایی که محدودیتهای اعمالشده را نقض میکند.
به طور پیشفرض، بررسیهای مربوط به قیدهای اضافی به طور مداوم توسط حلکننده معادله در طول تحلیل انجام میشود. Abaqus/Standard این قیدهای اضافی را حل نمیکند. در عوض، پیامهای دقیقی که ویژگیهای مدلسازی ایجادکننده قید اضافی را توصیف میکنند، برای کمک به کاربر در حل مسائل صادر میشوند. این پیام ابتدا گرههای درگیر در قید اضافی سازگار یا ناسازگار را با استفاده از اطلاعات محوری صفر از حذف گاوس در حلکننده شناسایی میکند ( به حلکننده معادله خطی مستقیم مراجعه کنید ). سپس یک پیام دقیق حاوی اطلاعات قید صادر میشود.








دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.