
مکانیزم میل لنگ
Crank mechanism
این مثال استفاده از عناصر رابط را برای مدلسازی قیود سینماتیکی بین اجسام صلب در یک مکانیزم چندجسمی نشان میدهد.
در این صفحه بحث میشود:
شرح مشکل
نتایج و بحث
فایلها
جداول
ارقام
شرح مشکل
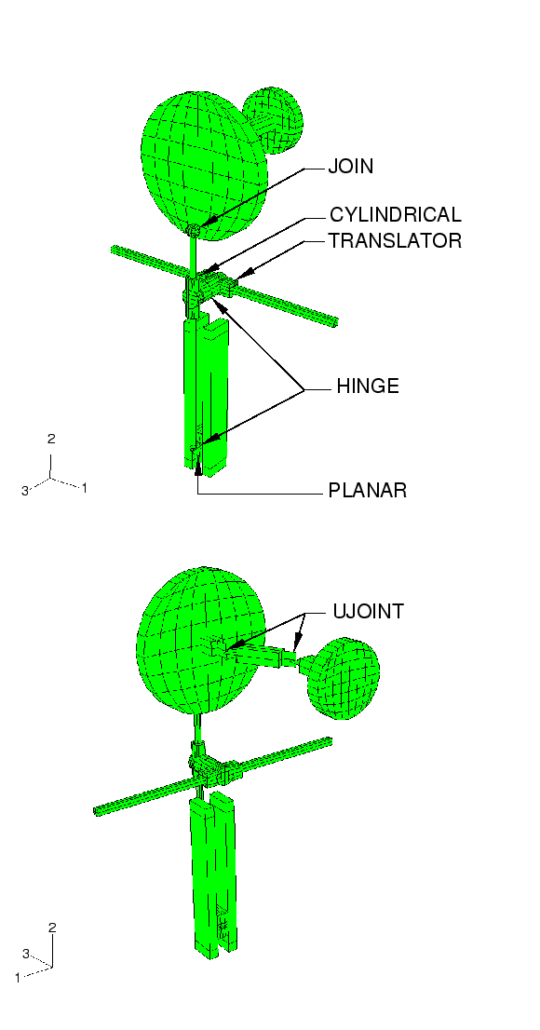
مکانیزم میللنگ مورد بررسی در اینجا، حرکت چرخشی را از طریق دو مفصل یونیورسال منتقل میکند و سپس چرخش را به حرکت انتقالی دو اسلاید تبدیل میکند. این مکانیزم با استفاده از نه جزء صلب متصل به هشت عنصر رابط مدلسازی شده است. قیود سینماتیکی مختلف مدلسازی شده با عناصر رابط شامل TRANSLATOR است که امکان انتقال نسبی در امتداد یک خط را فراهم میکند اما چرخش را مجاز نمیداند؛ HINGE که امکان یک چرخش نسبی را فراهم میکند و انتقالهای نسبی را ثابت نگه میدارد؛ CYLINDRICAL که امکان انتقال نسبی در امتداد یک خط و چرخش نسبی حول آن خط را فراهم میکند؛ JOIN که انتقالهای نسبی را ثابت میکند اما چرخشها را آزاد میگذارد؛ PLANAR که یک نقطه را روی یک صفحه نگه میدارد و فقط چرخشهای نسبی حول عمود بر آن صفحه را مجاز میداند؛ و UJOINT که انتقالهای نسبی را ثابت میکند و یک قید جهانی بر چرخشهای نسبی اعمال میکند.
Crank mechanism
این مثال استفاده از عناصر رابط را برای مدلسازی قیود سینماتیکی بین اجسام صلب در یک مکانیزم چندجسمی نشان میدهد.
در این صفحه بحث میشود:
شرح مشکل
نتایج و بحث
فایلها
جداول
ارقام
شرح مشکل
مکانیزم میللنگ مورد بررسی در اینجا، حرکت چرخشی را از طریق دو مفصل یونیورسال منتقل میکند و سپس چرخش را به حرکت انتقالی دو اسلاید تبدیل میکند. این مکانیزم با استفاده از نه جزء صلب متصل به هشت عنصر رابط مدلسازی شده است. قیود سینماتیکی مختلف مدلسازی شده با عناصر رابط شامل TRANSLATOR است که امکان انتقال نسبی در امتداد یک خط را فراهم میکند اما چرخش را مجاز نمیداند؛ HINGE که امکان یک چرخش نسبی را فراهم میکند و انتقالهای نسبی را ثابت نگه میدارد؛ CYLINDRICAL که امکان انتقال نسبی در امتداد یک خط و چرخش نسبی حول آن خط را فراهم میکند؛ JOIN که انتقالهای نسبی را ثابت میکند اما چرخشها را آزاد میگذارد؛ PLANAR که یک نقطه را روی یک صفحه نگه میدارد و فقط چرخشهای نسبی حول عمود بر آن صفحه را مجاز میداند؛ و UJOINT که انتقالهای نسبی را ثابت میکند و یک قید جهانی بر چرخشهای نسبی اعمال میکند.








دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.